


Robot swarms can operate more efficiently in warehouses, search for survivors after natural disasters, or jointly monitor large areas — but only if they can communicate effectively. Researchers at the Faculty of Mechanical Engineering, University of Ljubljana, have developed a new machine learning method that enables coordinated cooperation among more than 100 robots. The method lays the foundations for more reliable and scalable systems of autonomous mobile robots in industrial and service applications.
With the growing number of autonomous mobile robots in warehouses, factories, and service environments, their mutual cooperation is becoming increasingly important: as a group, robots can complete tasks faster, respond more quickly to local events, and are more resilient to failures. However, as the number of robots increases, problems quickly arise. The space of joint actions grows exponentially, communication channels become overloaded, and the signals of individual robots are lost in the noise of simultaneous messages.
Existing reinforcement learning approaches have focused on smaller groups or simplified scenarios without visual perception. Efficient learning of communication in large groups of robots capable of perceiving the environment through cameras has remained an open problem.
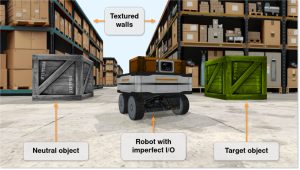
The researchers developed Century Maze, a simulated environment for collaborative navigation of large robot groups, as well as two new learning components that enable successful coordination between robots.
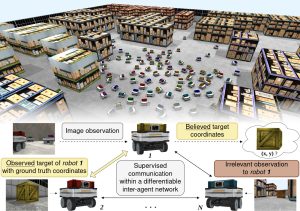
The first, Differentiable Inter-Agent Belief Learning, teaches robots to form their representations of goals based on observations of neighbouring agents, while providing a clear learning signal through the communication channel. The second, Informative Event Replay, detects and preserves rare but crucial events during training that are essential for the development of communication. The approach outperforms existing methods even under realistic conditions involving communication disturbances and changing visual and physical conditions.
![]()
The article was published in the journal IEEE Transactions on Robotics (Impact Factor 10.5 for 2024). The source code, trained models, and additional materials are publicly available in the online repository (https://github.com/JernejPuc/centurymaze).
Jernej Puc, Gašper Škulj, Jan Pleterski, Primož Podržaj, Rok Vrabič
Faculty of Mechanical Engineering, University of Ljubljana
The research was supported by the Slovenian Research and Innovation Agency (ARIS) under programme P2-0270 and project L2-60153.